#include "../SpuDoubleBuffer.h"#include "BulletCollision/BroadphaseCollision/btBroadphaseProxy.h"#include "BulletCollision/CollisionShapes/btConvexInternalShape.h"#include "BulletCollision/CollisionShapes/btCylinderShape.h"#include "BulletCollision/CollisionShapes/btStaticPlaneShape.h"#include "BulletCollision/CollisionShapes/btOptimizedBvh.h"#include "BulletCollision/CollisionShapes/btTriangleIndexVertexArray.h"#include "BulletCollision/CollisionShapes/btSphereShape.h"#include "BulletCollision/CollisionShapes/btCapsuleShape.h"#include "BulletCollision/CollisionShapes/btConvexShape.h"#include "BulletCollision/CollisionShapes/btBvhTriangleMeshShape.h"#include "BulletCollision/CollisionShapes/btConvexHullShape.h"#include "BulletCollision/CollisionShapes/btCompoundShape.h"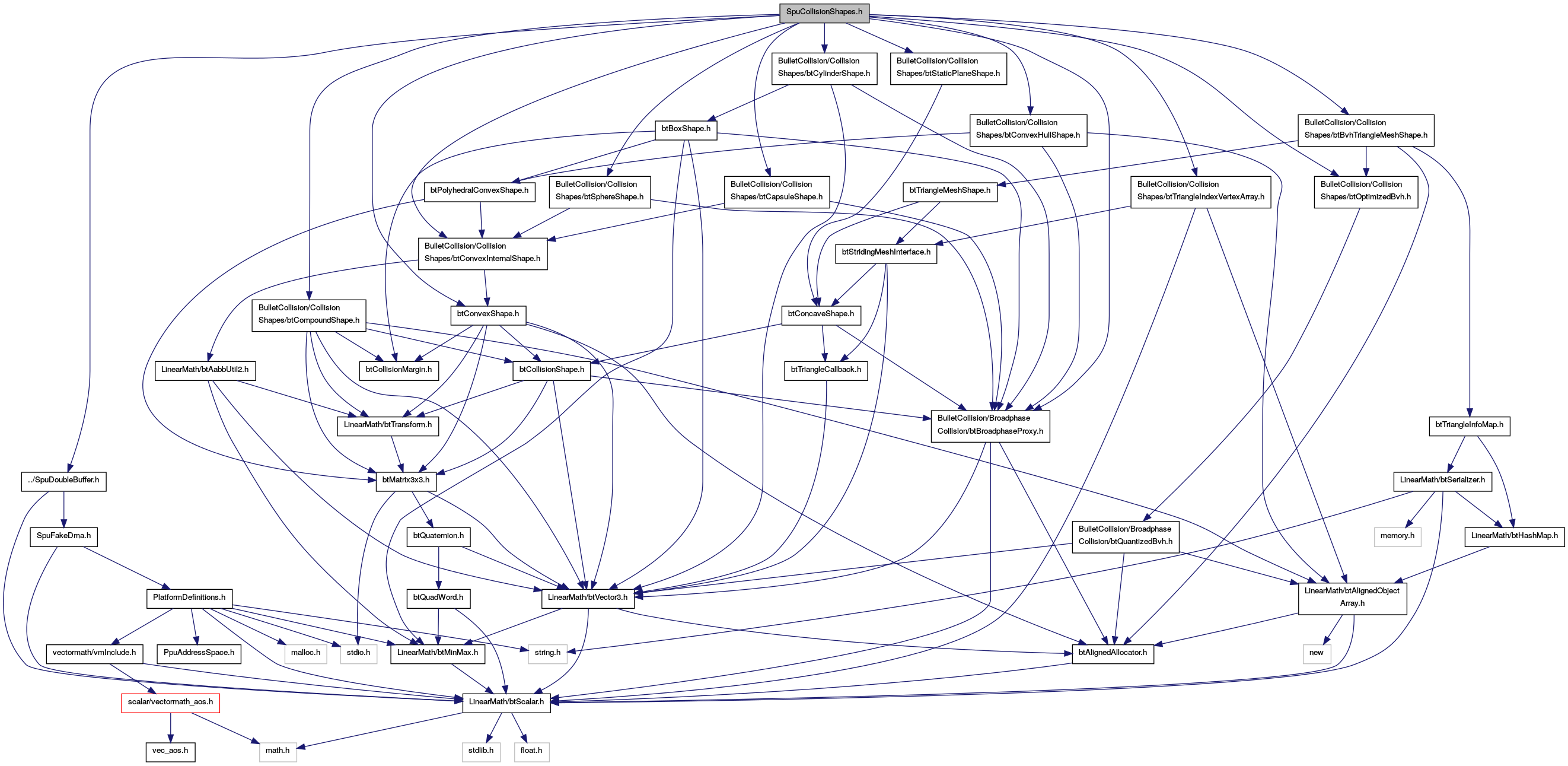

Go to the source code of this file.
Classes | |
| struct | SpuConvexPolyhedronVertexData |
| struct | CollisionShape_LocalStoreMemory |
| struct | CompoundShape_LocalStoreMemory |
| struct | bvhMeshShape_LocalStoreMemory |
Macros | |
| #define | MAX_NUM_SPU_CONVEX_POINTS 128 |
| #define | MAX_SPU_COMPOUND_SUBSHAPES 16 |
| #define | MAX_SHAPE_SIZE 256 |
| #define | MAX_SPU_SUBTREE_HEADERS 32 |
| #define | USE_BRANCHFREE_TEST 1 |
Functions | |
| void | computeAabb (btVector3 &aabbMin, btVector3 &aabbMax, btConvexInternalShape *convexShape, ppu_address_t convexShapePtr, int shapeType, const btTransform &xform) |
| not supported on IBM SDK, until we fix the alignment of btVector3 More... | |
| void | dmaBvhShapeData (bvhMeshShape_LocalStoreMemory *bvhMeshShape, btBvhTriangleMeshShape *triMeshShape) |
| void | dmaBvhIndexedMesh (btIndexedMesh *IndexMesh, IndexedMeshArray &indexArray, int index, uint32_t dmaTag) |
| void | dmaBvhSubTreeHeaders (btBvhSubtreeInfo *subTreeHeaders, ppu_address_t subTreePtr, int batchSize, uint32_t dmaTag) |
| void | dmaBvhSubTreeNodes (btQuantizedBvhNode *nodes, const btBvhSubtreeInfo &subtree, QuantizedNodeArray &nodeArray, int dmaTag) |
| int | getShapeTypeSize (int shapeType) |
| getShapeTypeSize could easily be optimized, but it is not likely a bottleneck More... | |
| void | dmaConvexVertexData (SpuConvexPolyhedronVertexData *convexVertexData, btConvexHullShape *convexShapeSPU) |
| void | dmaCollisionShape (void *collisionShapeLocation, ppu_address_t collisionShapePtr, uint32_t dmaTag, int shapeType) |
| void | dmaCompoundShapeInfo (CompoundShape_LocalStoreMemory *compoundShapeLocation, btCompoundShape *spuCompoundShape, uint32_t dmaTag) |
| void | dmaCompoundSubShapes (CompoundShape_LocalStoreMemory *compoundShapeLocation, btCompoundShape *spuCompoundShape, uint32_t dmaTag) |
| unsigned int | spuTestQuantizedAabbAgainstQuantizedAabb (unsigned short int *aabbMin1, unsigned short int *aabbMax1, const unsigned short int *aabbMin2, const unsigned short int *aabbMax2) |
| void | spuWalkStacklessQuantizedTree (btNodeOverlapCallback *nodeCallback, unsigned short int *quantizedQueryAabbMin, unsigned short int *quantizedQueryAabbMax, const btQuantizedBvhNode *rootNode, int startNodeIndex, int endNodeIndex) |
Macro Definition Documentation
| #define MAX_NUM_SPU_CONVEX_POINTS 128 |
Definition at line 36 of file SpuCollisionShapes.h.
| #define MAX_SHAPE_SIZE 256 |
Definition at line 38 of file SpuCollisionShapes.h.
| #define MAX_SPU_COMPOUND_SUBSHAPES 16 |
Definition at line 37 of file SpuCollisionShapes.h.
| #define MAX_SPU_SUBTREE_HEADERS 32 |
Definition at line 77 of file SpuCollisionShapes.h.
| #define USE_BRANCHFREE_TEST 1 |
Definition at line 97 of file SpuCollisionShapes.h.
Function Documentation
| void computeAabb | ( | btVector3 & | aabbMin, |
| btVector3 & | aabbMax, | ||
| btConvexInternalShape * | convexShape, | ||
| ppu_address_t | convexShapePtr, | ||
| int | shapeType, | ||
| const btTransform & | xform | ||
| ) |
not supported on IBM SDK, until we fix the alignment of btVector3
Definition at line 32 of file SpuCollisionShapes.cpp.
| void dmaBvhIndexedMesh | ( | btIndexedMesh * | IndexMesh, |
| IndexedMeshArray & | indexArray, | ||
| int | index, | ||
| uint32_t | dmaTag | ||
| ) |
Definition at line 134 of file SpuCollisionShapes.cpp.
| void dmaBvhShapeData | ( | bvhMeshShape_LocalStoreMemory * | bvhMeshShape, |
| btBvhTriangleMeshShape * | triMeshShape | ||
| ) |
now DMA over the BVH
Definition at line 107 of file SpuCollisionShapes.cpp.
| void dmaBvhSubTreeHeaders | ( | btBvhSubtreeInfo * | subTreeHeaders, |
| ppu_address_t | subTreePtr, | ||
| int | batchSize, | ||
| uint32_t | dmaTag | ||
| ) |
Definition at line 140 of file SpuCollisionShapes.cpp.
| void dmaBvhSubTreeNodes | ( | btQuantizedBvhNode * | nodes, |
| const btBvhSubtreeInfo & | subtree, | ||
| QuantizedNodeArray & | nodeArray, | ||
| int | dmaTag | ||
| ) |
Definition at line 145 of file SpuCollisionShapes.cpp.
| void dmaCollisionShape | ( | void * | collisionShapeLocation, |
| ppu_address_t | collisionShapePtr, | ||
| uint32_t | dmaTag, | ||
| int | shapeType | ||
| ) |
Definition at line 230 of file SpuCollisionShapes.cpp.
| void dmaCompoundShapeInfo | ( | CompoundShape_LocalStoreMemory * | compoundShapeLocation, |
| btCompoundShape * | spuCompoundShape, | ||
| uint32_t | dmaTag | ||
| ) |
Definition at line 238 of file SpuCollisionShapes.cpp.
| void dmaCompoundSubShapes | ( | CompoundShape_LocalStoreMemory * | compoundShapeLocation, |
| btCompoundShape * | spuCompoundShape, | ||
| uint32_t | dmaTag | ||
| ) |
Definition at line 248 of file SpuCollisionShapes.cpp.
| void dmaConvexVertexData | ( | SpuConvexPolyhedronVertexData * | convexVertexData, |
| btConvexHullShape * | convexShapeSPU | ||
| ) |
Definition at line 215 of file SpuCollisionShapes.cpp.
| int getShapeTypeSize | ( | int | shapeType | ) |
getShapeTypeSize could easily be optimized, but it is not likely a bottleneck
Definition at line 151 of file SpuCollisionShapes.cpp.
|
inline |
Definition at line 99 of file SpuCollisionShapes.h.
| void spuWalkStacklessQuantizedTree | ( | btNodeOverlapCallback * | nodeCallback, |
| unsigned short int * | quantizedQueryAabbMin, | ||
| unsigned short int * | quantizedQueryAabbMax, | ||
| const btQuantizedBvhNode * | rootNode, | ||
| int | startNodeIndex, | ||
| int | endNodeIndex | ||
| ) |
Definition at line 261 of file SpuCollisionShapes.cpp.
