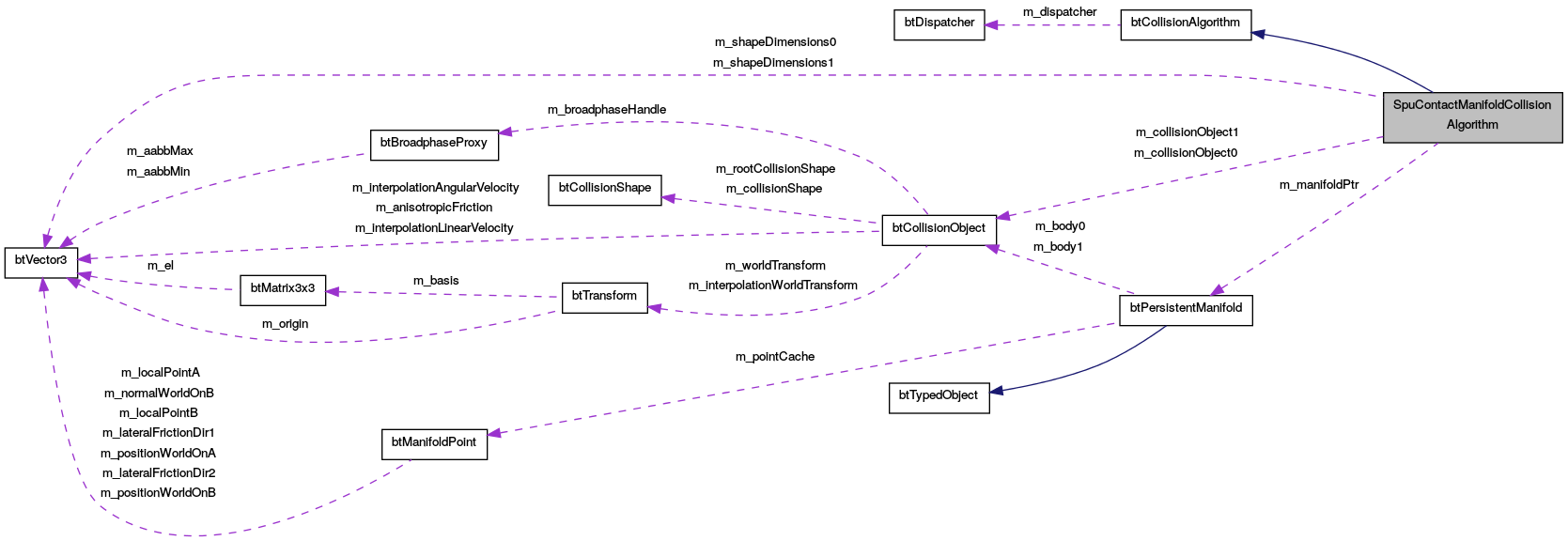
SpuContactManifoldCollisionAlgorithm provides contact manifold and should be processed on SPU.
More...
#include <SpuContactManifoldCollisionAlgorithm.h>
SpuContactManifoldCollisionAlgorithm provides contact manifold and should be processed on SPU.
Definition at line 31 of file SpuContactManifoldCollisionAlgorithm.h.
| SpuContactManifoldCollisionAlgorithm::~SpuContactManifoldCollisionAlgorithm |
( |
| ) |
|
|
virtual |
| virtual void SpuContactManifoldCollisionAlgorithm::getAllContactManifolds |
( |
btManifoldArray & |
manifoldArray | ) |
|
|
inlinevirtual |
| float SpuContactManifoldCollisionAlgorithm::getCollisionMargin0 |
( |
| ) |
const |
|
inline |
| float SpuContactManifoldCollisionAlgorithm::getCollisionMargin1 |
( |
| ) |
const |
|
inline |
| const btCollisionObject* SpuContactManifoldCollisionAlgorithm::getCollisionObject0 |
( |
| ) |
|
|
inline |
| const btCollisionObject* SpuContactManifoldCollisionAlgorithm::getCollisionObject1 |
( |
| ) |
|
|
inline |
| const btVector3& SpuContactManifoldCollisionAlgorithm::getShapeDimensions0 |
( |
| ) |
const |
|
inline |
| const btVector3& SpuContactManifoldCollisionAlgorithm::getShapeDimensions1 |
( |
| ) |
const |
|
inline |
| int SpuContactManifoldCollisionAlgorithm::getShapeType0 |
( |
| ) |
const |
|
inline |
| int SpuContactManifoldCollisionAlgorithm::getShapeType1 |
( |
| ) |
const |
|
inline |
| float SpuContactManifoldCollisionAlgorithm::m_collisionMargin0 |
|
private |
| float SpuContactManifoldCollisionAlgorithm::m_collisionMargin1 |
|
private |
| btVector3 SpuContactManifoldCollisionAlgorithm::m_shapeDimensions0 |
|
private |
| btVector3 SpuContactManifoldCollisionAlgorithm::m_shapeDimensions1 |
|
private |
| int SpuContactManifoldCollisionAlgorithm::m_shapeType0 |
|
private |
| int SpuContactManifoldCollisionAlgorithm::m_shapeType1 |
|
private |
The documentation for this class was generated from the following files:
 Protected Attributes inherited from btCollisionAlgorithm
Protected Attributes inherited from btCollisionAlgorithm