btContactConstraint can be automatically created to solve contact constraints using the unified btTypedConstraint interface More...
#include <btContactConstraint.h>
Public Member Functions | |
| btContactConstraint (btPersistentManifold *contactManifold, btRigidBody &rbA, btRigidBody &rbB) | |
| void | setContactManifold (btPersistentManifold *contactManifold) |
| btPersistentManifold * | getContactManifold () |
| const btPersistentManifold * | getContactManifold () const |
| virtual | ~btContactConstraint () |
| virtual void | getInfo1 (btConstraintInfo1 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | getInfo2 (btConstraintInfo2 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| virtual void | buildJacobian () |
| obsolete methods More... | |
 Public Member Functions inherited from btTypedConstraint Public Member Functions inherited from btTypedConstraint | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| virtual | ~btTypedConstraint () |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA) | |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA, btRigidBody &rbB) | |
| int | getOverrideNumSolverIterations () const |
| void | setOverrideNumSolverIterations (int overideNumIterations) |
| override the number of constraint solver iterations used to solve this constraint -1 will use the default number of iterations, as specified in SolverInfo.m_numIterations More... | |
| virtual void | setupSolverConstraint (btConstraintArray &ca, int solverBodyA, int solverBodyB, btScalar timeStep) |
| internal method used by the constraint solver, don't use them directly More... | |
| void | internalSetAppliedImpulse (btScalar appliedImpulse) |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | internalGetAppliedImpulse () |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | getBreakingImpulseThreshold () const |
| void | setBreakingImpulseThreshold (btScalar threshold) |
| bool | isEnabled () const |
| void | setEnabled (bool enabled) |
| virtual void | solveConstraintObsolete (btSolverBody &, btSolverBody &, btScalar) |
| internal method used by the constraint solver, don't use them directly More... | |
| const btRigidBody & | getRigidBodyA () const |
| const btRigidBody & | getRigidBodyB () const |
| btRigidBody & | getRigidBodyA () |
| btRigidBody & | getRigidBodyB () |
| int | getUserConstraintType () const |
| void | setUserConstraintType (int userConstraintType) |
| void | setUserConstraintId (int uid) |
| int | getUserConstraintId () const |
| void | setUserConstraintPtr (void *ptr) |
| void * | getUserConstraintPtr () |
| void | setJointFeedback (btJointFeedback *jointFeedback) |
| const btJointFeedback * | getJointFeedback () const |
| btJointFeedback * | getJointFeedback () |
| int | getUid () const |
| bool | needsFeedback () const |
| void | enableFeedback (bool needsFeedback) |
| enableFeedback will allow to read the applied linear and angular impulse use getAppliedImpulse, getAppliedLinearImpulse and getAppliedAngularImpulse to read feedback information More... | |
| btScalar | getAppliedImpulse () const |
| getAppliedImpulse is an estimated total applied impulse. More... | |
| btTypedConstraintType | getConstraintType () const |
| void | setDbgDrawSize (btScalar dbgDrawSize) |
| btScalar | getDbgDrawSize () |
| virtual void | setParam (int num, btScalar value, int axis=-1)=0 |
| override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5). More... | |
| virtual btScalar | getParam (int num, int axis=-1) const =0 |
| return the local value of parameter More... | |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| Public Member Functions inherited from btTypedObject | |
| btTypedObject (int objectType) | |
| int | getObjectType () const |
Protected Attributes | |
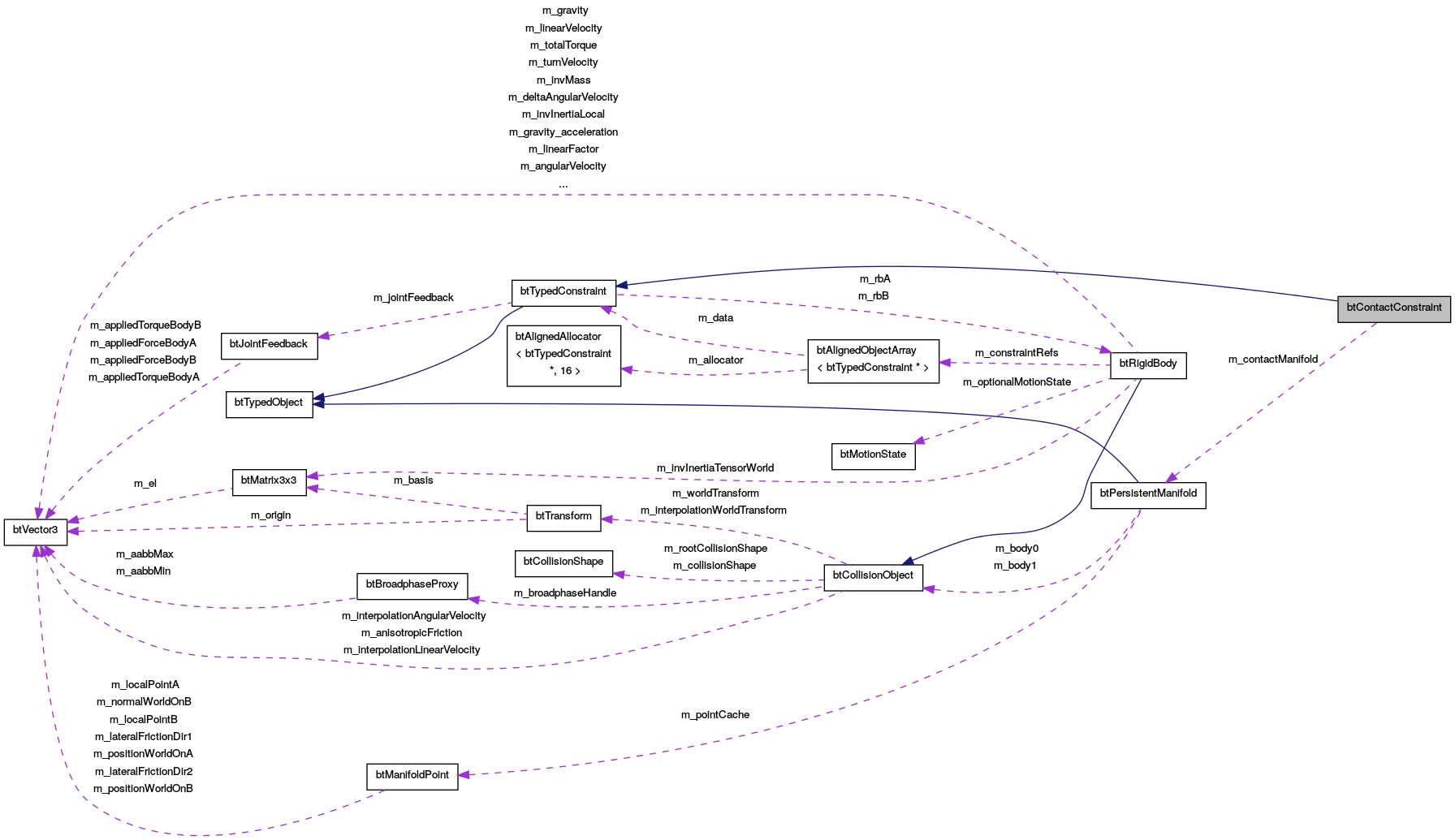
| btPersistentManifold | m_contactManifold |
| Protected Attributes inherited from btTypedConstraint | |
| btRigidBody & | m_rbA |
| btRigidBody & | m_rbB |
| btScalar | m_appliedImpulse |
| btScalar | m_dbgDrawSize |
| btJointFeedback * | m_jointFeedback |
Additional Inherited Members | |
| Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
| Protected Member Functions inherited from btTypedConstraint | |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| internal method used by the constraint solver, don't use them directly More... | |
Detailed Description
btContactConstraint can be automatically created to solve contact constraints using the unified btTypedConstraint interface
Definition at line 25 of file btContactConstraint.h.
Constructor & Destructor Documentation
| btContactConstraint::btContactConstraint | ( | btPersistentManifold * | contactManifold, |
| btRigidBody & | rbA, | ||
| btRigidBody & | rbB | ||
| ) |
Definition at line 27 of file btContactConstraint.cpp.
|
virtual |
Definition at line 34 of file btContactConstraint.cpp.
Member Function Documentation
|
virtual |
obsolete methods
Reimplemented from btTypedConstraint.
Definition at line 54 of file btContactConstraint.cpp.
|
inline |
Definition at line 38 of file btContactConstraint.h.
|
inline |
Definition at line 43 of file btContactConstraint.h.
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 44 of file btContactConstraint.cpp.
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 49 of file btContactConstraint.cpp.
| void btContactConstraint::setContactManifold | ( | btPersistentManifold * | contactManifold | ) |
Definition at line 39 of file btContactConstraint.cpp.
Member Data Documentation
|
protected |
Definition at line 29 of file btContactConstraint.h.
The documentation for this class was generated from the following files:
