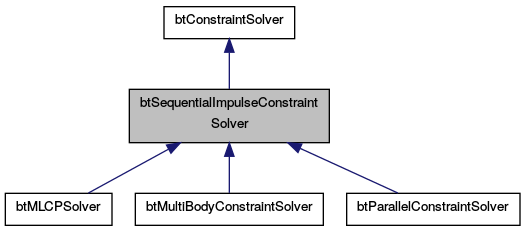
The btSequentialImpulseConstraintSolver is a fast SIMD implementation of the Projected Gauss Seidel (iterative LCP) method. More...
#include <btSequentialImpulseConstraintSolver.h>
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btSequentialImpulseConstraintSolver () | |
| virtual | ~btSequentialImpulseConstraintSolver () |
| virtual btScalar | solveGroup (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifold, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &info, btIDebugDraw *debugDrawer, btDispatcher *dispatcher) |
| btSequentialImpulseConstraintSolver Sequentially applies impulses More... | |
| virtual void | reset () |
| clear internal cached data and reset random seed More... | |
| unsigned long | btRand2 () |
| int | btRandInt2 (int n) |
| void | setRandSeed (unsigned long seed) |
| unsigned long | getRandSeed () const |
| virtual btConstraintSolverType | getSolverType () const |
 Public Member Functions inherited from btConstraintSolver Public Member Functions inherited from btConstraintSolver | |
| virtual | ~btConstraintSolver () |
| virtual void | prepareSolve (int, int) |
| virtual void | allSolved (const btContactSolverInfo &, class btIDebugDraw *) |
Protected Member Functions | |
| void | setupFrictionConstraint (btSolverConstraint &solverConstraint, const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| void | setupRollingFrictionConstraint (btSolverConstraint &solverConstraint, const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| btSolverConstraint & | addFrictionConstraint (const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, int frictionIndex, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| btSolverConstraint & | addRollingFrictionConstraint (const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, int frictionIndex, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0, btScalar cfmSlip=0.f) |
| void | setupContactConstraint (btSolverConstraint &solverConstraint, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btContactSolverInfo &infoGlobal, btScalar &relaxation, const btVector3 &rel_pos1, const btVector3 &rel_pos2) |
| void | setFrictionConstraintImpulse (btSolverConstraint &solverConstraint, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btContactSolverInfo &infoGlobal) |
| btScalar | restitutionCurve (btScalar rel_vel, btScalar restitution) |
| virtual void | convertContacts (btPersistentManifold **manifoldPtr, int numManifolds, const btContactSolverInfo &infoGlobal) |
| void | convertContact (btPersistentManifold *manifold, const btContactSolverInfo &infoGlobal) |
| void | resolveSplitPenetrationSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| void | resolveSplitPenetrationImpulseCacheFriendly (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| int | getOrInitSolverBody (btCollisionObject &body, btScalar timeStep) |
| void | initSolverBody (btSolverBody *solverBody, btCollisionObject *collisionObject, btScalar timeStep) |
| void | resolveSingleConstraintRowGeneric (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| void | resolveSingleConstraintRowGenericSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| void | resolveSingleConstraintRowLowerLimit (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| void | resolveSingleConstraintRowLowerLimitSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| virtual void | solveGroupCacheFriendlySplitImpulseIterations (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| virtual btScalar | solveGroupCacheFriendlyFinish (btCollisionObject **bodies, int numBodies, const btContactSolverInfo &infoGlobal) |
| virtual btScalar | solveSingleIteration (int iteration, btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| virtual btScalar | solveGroupCacheFriendlySetup (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| virtual btScalar | solveGroupCacheFriendlyIterations (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
Static Protected Member Functions | |
| static void | applyAnisotropicFriction (btCollisionObject *colObj, btVector3 &frictionDirection, int frictionMode) |
Protected Attributes | |
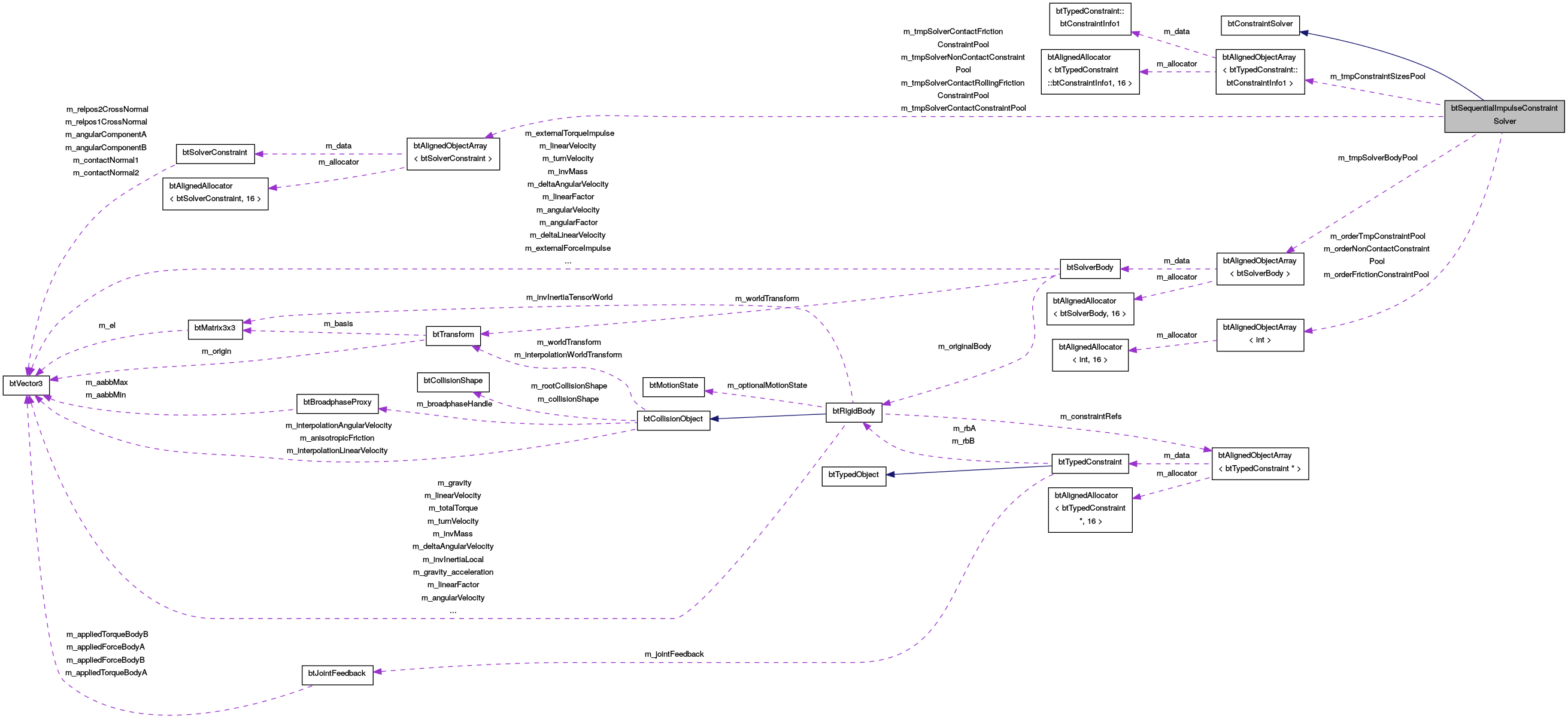
| btAlignedObjectArray < btSolverBody > | m_tmpSolverBodyPool |
| btConstraintArray | m_tmpSolverContactConstraintPool |
| btConstraintArray | m_tmpSolverNonContactConstraintPool |
| btConstraintArray | m_tmpSolverContactFrictionConstraintPool |
| btConstraintArray | m_tmpSolverContactRollingFrictionConstraintPool |
| btAlignedObjectArray< int > | m_orderTmpConstraintPool |
| btAlignedObjectArray< int > | m_orderNonContactConstraintPool |
| btAlignedObjectArray< int > | m_orderFrictionConstraintPool |
| btAlignedObjectArray < btTypedConstraint::btConstraintInfo1 > | m_tmpConstraintSizesPool |
| int | m_maxOverrideNumSolverIterations |
| int | m_fixedBodyId |
| unsigned long | m_btSeed2 |
| m_btSeed2 is used for re-arranging the constraint rows. improves convergence/quality of friction More... | |
Detailed Description
The btSequentialImpulseConstraintSolver is a fast SIMD implementation of the Projected Gauss Seidel (iterative LCP) method.
Definition at line 31 of file btSequentialImpulseConstraintSolver.h.
Constructor & Destructor Documentation
| btSequentialImpulseConstraintSolver::btSequentialImpulseConstraintSolver | ( | ) |
Definition at line 40 of file btSequentialImpulseConstraintSolver.cpp.
|
virtual |
Definition at line 46 of file btSequentialImpulseConstraintSolver.cpp.
Member Function Documentation
|
protected |
Definition at line 440 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 527 of file btSequentialImpulseConstraintSolver.cpp.
|
staticprotected |
Definition at line 334 of file btSequentialImpulseConstraintSolver.cpp.
| btSequentialImpulseConstraintSolver::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
| unsigned long btSequentialImpulseConstraintSolver::btRand2 | ( | ) |
Definition at line 245 of file btSequentialImpulseConstraintSolver.cpp.
| int btSequentialImpulseConstraintSolver::btRandInt2 | ( | int | n | ) |
Definition at line 254 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
avoid collision response between two static objects
Bullet has several options to set the friction directions By default, each contact has only a single friction direction that is recomputed automatically very frame based on the relative linear velocity. If the relative velocity it zero, it will automatically compute a friction direction.
You can also enable two friction directions, using the SOLVER_USE_2_FRICTION_DIRECTIONS. In that case, the second friction direction will be orthogonal to both contact normal and first friction direction.
If you choose SOLVER_DISABLE_VELOCITY_DEPENDENT_FRICTION_DIRECTION, then the friction will be independent from the relative projected velocity.
The user can manually override the friction directions for certain contacts using a contact callback, and set the cp.m_lateralFrictionInitialized to true In that case, you can set the target relative motion in each friction direction (cp.m_contactMotion1 and cp.m_contactMotion2) this will give a conveyor belt effect
Definition at line 796 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
Reimplemented in btMultiBodyConstraintSolver.
Definition at line 976 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 537 of file btSequentialImpulseConstraintSolver.cpp.
|
inline |
Definition at line 132 of file btSequentialImpulseConstraintSolver.h.
|
inlinevirtual |
Implements btConstraintSolver.
Reimplemented in btMLCPSolver.
Definition at line 138 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 283 of file btSequentialImpulseConstraintSolver.cpp.
|
virtual |
clear internal cached data and reset random seed
Implements btConstraintSolver.
Definition at line 1734 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 95 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 61 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 156 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 125 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 179 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 208 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 326 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 750 of file btSequentialImpulseConstraintSolver.cpp.
|
inline |
Definition at line 128 of file btSequentialImpulseConstraintSolver.h.
|
protected |
warm starting (or zero if disabled)
Definition at line 577 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 354 of file btSequentialImpulseConstraintSolver.cpp.
|
protected |
Definition at line 450 of file btSequentialImpulseConstraintSolver.cpp.
|
virtual |
btSequentialImpulseConstraintSolver Sequentially applies impulses
Implements btConstraintSolver.
Reimplemented in btParallelConstraintSolver, and btMultiBodyConstraintSolver.
Definition at line 1719 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
Definition at line 1633 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
this is a special step to resolve penetrations (just for contacts)
Reimplemented in btMLCPSolver.
Definition at line 1613 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
setup the btSolverConstraints
the size of btSolverConstraint needs be a multiple of btScalar
finalize the constraint setup
Reimplemented in btMultiBodyConstraintSolver, and btMLCPSolver.
Definition at line 990 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
Definition at line 1573 of file btSequentialImpulseConstraintSolver.cpp.
|
protectedvirtual |
solve all joint constraints, using SIMD, if available
solve all contact constraints using SIMD, if available
solve all friction constraints, using SIMD, if available
solve all joint constraints
solve all contact constraints
solve all friction constraints
Reimplemented in btMultiBodyConstraintSolver.
Definition at line 1335 of file btSequentialImpulseConstraintSolver.cpp.
Member Data Documentation
|
protected |
m_btSeed2 is used for re-arranging the constraint rows. improves convergence/quality of friction
Definition at line 69 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 45 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 44 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 42 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 41 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 40 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 43 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 34 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 35 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 37 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 38 of file btSequentialImpulseConstraintSolver.h.
|
protected |
Definition at line 36 of file btSequentialImpulseConstraintSolver.h.
The documentation for this class was generated from the following files:
