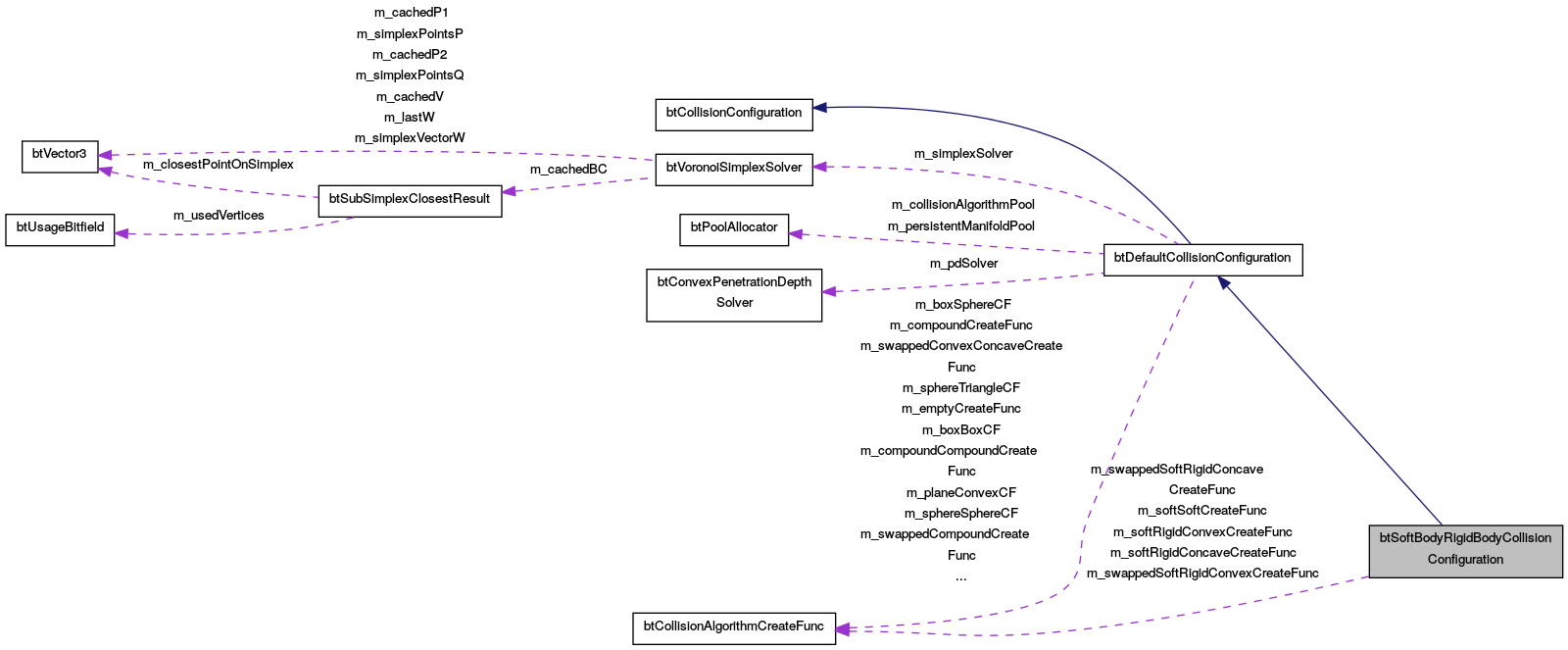
btSoftBodyRigidBodyCollisionConfiguration add softbody interaction on top of btDefaultCollisionConfiguration More...
#include <btSoftBodyRigidBodyCollisionConfiguration.h>
Public Member Functions | |
| btSoftBodyRigidBodyCollisionConfiguration (const btDefaultCollisionConstructionInfo &constructionInfo=btDefaultCollisionConstructionInfo()) | |
| virtual | ~btSoftBodyRigidBodyCollisionConfiguration () |
| virtual btCollisionAlgorithmCreateFunc * | getCollisionAlgorithmCreateFunc (int proxyType0, int proxyType1) |
| creation of soft-soft and soft-rigid, and otherwise fallback to base class implementation More... | |
 Public Member Functions inherited from btDefaultCollisionConfiguration Public Member Functions inherited from btDefaultCollisionConfiguration | |
| btDefaultCollisionConfiguration (const btDefaultCollisionConstructionInfo &constructionInfo=btDefaultCollisionConstructionInfo()) | |
| virtual | ~btDefaultCollisionConfiguration () |
| virtual btPoolAllocator * | getPersistentManifoldPool () |
| memory pools More... | |
| virtual btPoolAllocator * | getCollisionAlgorithmPool () |
| virtual btVoronoiSimplexSolver * | getSimplexSolver () |
| void | setConvexConvexMultipointIterations (int numPerturbationIterations=3, int minimumPointsPerturbationThreshold=3) |
| Use this method to allow to generate multiple contact points between at once, between two objects using the generic convex-convex algorithm. More... | |
| void | setPlaneConvexMultipointIterations (int numPerturbationIterations=3, int minimumPointsPerturbationThreshold=3) |
| Public Member Functions inherited from btCollisionConfiguration | |
| virtual | ~btCollisionConfiguration () |
Detailed Description
btSoftBodyRigidBodyCollisionConfiguration add softbody interaction on top of btDefaultCollisionConfiguration
Definition at line 26 of file btSoftBodyRigidBodyCollisionConfiguration.h.
Constructor & Destructor Documentation
| btSoftBodyRigidBodyCollisionConfiguration::btSoftBodyRigidBodyCollisionConfiguration | ( | const btDefaultCollisionConstructionInfo & | constructionInfo = btDefaultCollisionConstructionInfo() | ) |
calculate maximum element size, big enough to fit any collision algorithm in the memory pool
Definition at line 25 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
|
virtual |
Definition at line 75 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
Member Function Documentation
|
virtual |
creation of soft-soft and soft-rigid, and otherwise fallback to base class implementation
try to handle the softbody interactions first
softbody versus convex
convex versus soft body
softbody versus convex
convex versus soft body
fallback to the regular rigid collision shape
Reimplemented from btDefaultCollisionConfiguration.
Definition at line 96 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
Member Data Documentation
|
private |
Definition at line 33 of file btSoftBodyRigidBodyCollisionConfiguration.h.
|
private |
Definition at line 31 of file btSoftBodyRigidBodyCollisionConfiguration.h.
|
private |
Definition at line 30 of file btSoftBodyRigidBodyCollisionConfiguration.h.
|
private |
Definition at line 34 of file btSoftBodyRigidBodyCollisionConfiguration.h.
|
private |
Definition at line 32 of file btSoftBodyRigidBodyCollisionConfiguration.h.
The documentation for this class was generated from the following files:
