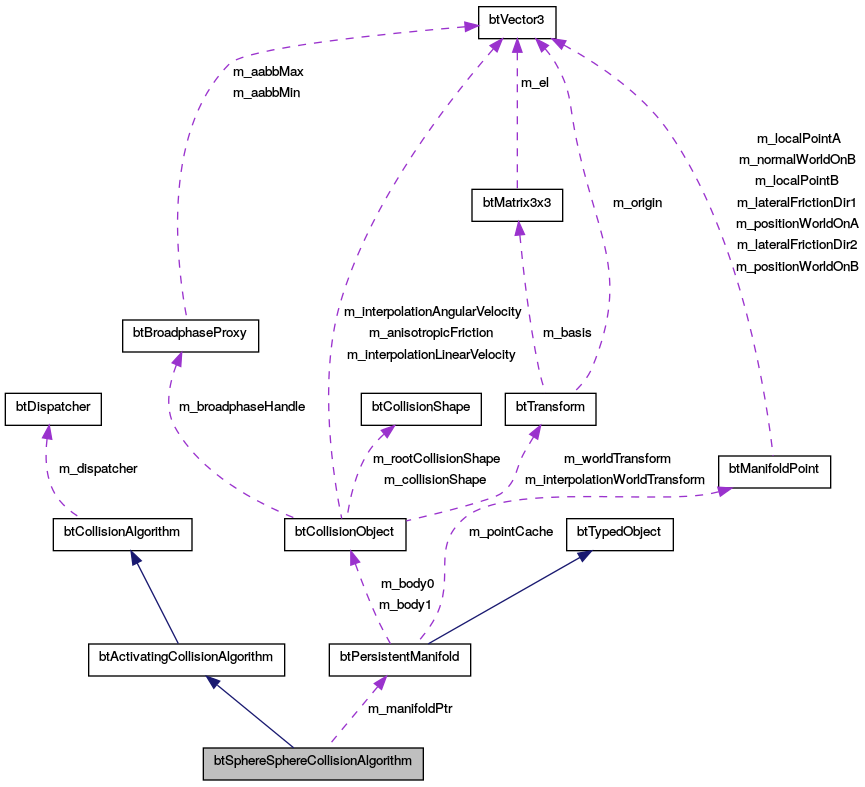
btSphereSphereCollisionAlgorithm provides sphere-sphere collision detection. More...
#include <btSphereSphereCollisionAlgorithm.h>
Classes | |
| struct | CreateFunc |
Private Attributes | |
| bool | m_ownManifold |
| btPersistentManifold * | m_manifoldPtr |
Additional Inherited Members | |
 Protected Attributes inherited from btCollisionAlgorithm Protected Attributes inherited from btCollisionAlgorithm | |
| btDispatcher * | m_dispatcher |
Detailed Description
btSphereSphereCollisionAlgorithm provides sphere-sphere collision detection.
Other features are frame-coherency (persistent data) and collision response. Also provides the most basic sample for custom/user btCollisionAlgorithm
Definition at line 29 of file btSphereSphereCollisionAlgorithm.h.
Constructor & Destructor Documentation
| btSphereSphereCollisionAlgorithm::btSphereSphereCollisionAlgorithm | ( | btPersistentManifold * | mf, |
| const btCollisionAlgorithmConstructionInfo & | ci, | ||
| const btCollisionObjectWrapper * | col0Wrap, | ||
| const btCollisionObjectWrapper * | col1Wrap | ||
| ) |
Definition at line 22 of file btSphereSphereCollisionAlgorithm.cpp.
|
inline |
Definition at line 37 of file btSphereSphereCollisionAlgorithm.h.
|
virtual |
Definition at line 34 of file btSphereSphereCollisionAlgorithm.cpp.
Member Function Documentation
|
virtual |
Implements btCollisionAlgorithm.
Definition at line 97 of file btSphereSphereCollisionAlgorithm.cpp.
|
inlinevirtual |
Implements btCollisionAlgorithm.
Definition at line 44 of file btSphereSphereCollisionAlgorithm.h.
|
virtual |
iff distance positive, don't generate a new contact
distance (negative means penetration)
point on A (worldspace) btVector3 pos0 = col0->getWorldTransform().getOrigin() - radius0 * normalOnSurfaceB; point on B (worldspace)
report a contact. internally this will be kept persistent, and contact reduction is done
Implements btCollisionAlgorithm.
Definition at line 43 of file btSphereSphereCollisionAlgorithm.cpp.
Member Data Documentation
|
private |
Definition at line 32 of file btSphereSphereCollisionAlgorithm.h.
|
private |
Definition at line 31 of file btSphereSphereCollisionAlgorithm.h.
The documentation for this class was generated from the following files:
