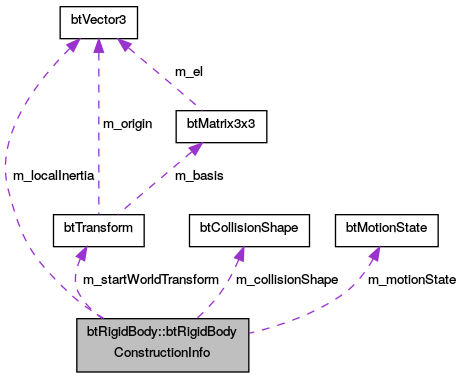
The btRigidBodyConstructionInfo structure provides information to create a rigid body. More...
#include <btRigidBody.h>
Public Member Functions | |
| btRigidBodyConstructionInfo (btScalar mass, btMotionState *motionState, btCollisionShape *collisionShape, const btVector3 &localInertia=btVector3(0, 0, 0)) | |
Public Attributes | |
| btScalar | m_mass |
| btMotionState * | m_motionState |
| When a motionState is provided, the rigid body will initialize its world transform from the motion state In this case, m_startWorldTransform is ignored. More... | |
| btTransform | m_startWorldTransform |
| btCollisionShape * | m_collisionShape |
| btVector3 | m_localInertia |
| btScalar | m_linearDamping |
| btScalar | m_angularDamping |
| btScalar | m_friction |
| best simulation results when friction is non-zero More... | |
| btScalar | m_rollingFriction |
| the m_rollingFriction prevents rounded shapes, such as spheres, cylinders and capsules from rolling forever. More... | |
| btScalar | m_restitution |
| best simulation results using zero restitution. More... | |
| btScalar | m_linearSleepingThreshold |
| btScalar | m_angularSleepingThreshold |
| bool | m_additionalDamping |
| btScalar | m_additionalDampingFactor |
| btScalar | m_additionalLinearDampingThresholdSqr |
| btScalar | m_additionalAngularDampingThresholdSqr |
| btScalar | m_additionalAngularDampingFactor |
Detailed Description
The btRigidBodyConstructionInfo structure provides information to create a rigid body.
Setting mass to zero creates a fixed (non-dynamic) rigid body. For dynamic objects, you can use the collision shape to approximate the local inertia tensor, otherwise use the zero vector (default argument) You can use the motion state to synchronize the world transform between physics and graphics objects. And if the motion state is provided, the rigid body will initialize its initial world transform from the motion state, m_startWorldTransform is only used when you don't provide a motion state.
Definition at line 116 of file btRigidBody.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 149 of file btRigidBody.h.
Member Data Documentation
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_additionalAngularDampingFactor |
Definition at line 147 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_additionalAngularDampingThresholdSqr |
Definition at line 146 of file btRigidBody.h.
| bool btRigidBody::btRigidBodyConstructionInfo::m_additionalDamping |
Definition at line 143 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_additionalDampingFactor |
Definition at line 144 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_additionalLinearDampingThresholdSqr |
Definition at line 145 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_angularDamping |
Definition at line 128 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_angularSleepingThreshold |
Definition at line 139 of file btRigidBody.h.
| btCollisionShape* btRigidBody::btRigidBodyConstructionInfo::m_collisionShape |
Definition at line 125 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_friction |
best simulation results when friction is non-zero
Definition at line 131 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_linearDamping |
Definition at line 127 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_linearSleepingThreshold |
Definition at line 138 of file btRigidBody.h.
| btVector3 btRigidBody::btRigidBodyConstructionInfo::m_localInertia |
Definition at line 126 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_mass |
Definition at line 118 of file btRigidBody.h.
| btMotionState* btRigidBody::btRigidBodyConstructionInfo::m_motionState |
When a motionState is provided, the rigid body will initialize its world transform from the motion state In this case, m_startWorldTransform is ignored.
Definition at line 122 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_restitution |
best simulation results using zero restitution.
Definition at line 136 of file btRigidBody.h.
| btScalar btRigidBody::btRigidBodyConstructionInfo::m_rollingFriction |
the m_rollingFriction prevents rounded shapes, such as spheres, cylinders and capsules from rolling forever.
See Bullet/Demos/RollingFrictionDemo for usage
Definition at line 134 of file btRigidBody.h.
| btTransform btRigidBody::btRigidBodyConstructionInfo::m_startWorldTransform |
Definition at line 123 of file btRigidBody.h.
The documentation for this struct was generated from the following file:
