Introduction of Computer Codes produced from
research of Prof. Ma and his group
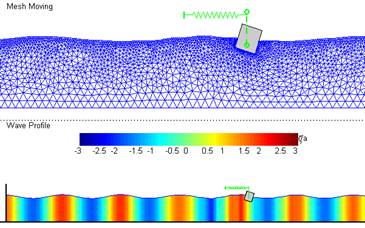
QALE_FEM/FLOATMov
This code can model 3D
extremely steep waves and overturning waves, as well as their interaction with
single and multiple floating bodies.
According to our numerical tests, this code can be at least 10 time
fasters than others with similar capacity.
Most relevant publications
including:
¡¤
Ma, Q.W. and Yan, S., 2006, ¡°Quasi ALE finite element method for nonlinear water waves¡±, Journal of Computational Physics, Vol.
212, Issue 1, pp. 52-72.
¡¤
Yan, S. and Ma,
Q.W., 2006, ¡°Numerical simulation of fully nonlinear interaction between steep
waves and 2D floating bodies using QALE-FEM method¡±, Journal of Computational
Physics,Vol. 221, Issue 2, pp. 666-692;
¡¤
Ma, Q.W. and Yan,
S 2009, ¡°QALE-FEM for Numerical Modelling of Nonlinear Interaction between 3D
Moored Floating Bodies and Steep Waves,¡± International
Journal for Numerical Methods in Engineering, Vol. 78, pp. 713-756.
¡¤ Yan, S, and Ma,
Q.W., 2010, ¡°QALE-FEM for modelling 3D overturning waves,¡± International
Journal for Numerical Methods in Fluids, Vol. 63, pp.743 ¨C 768.
Free response of 2D body in water waves
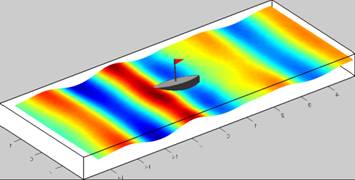
Response of
a 3D Wigley Hull to steep waves with a incident angle of 15o
(please click here to download the
movies of the free-response case or here for fixed cases)
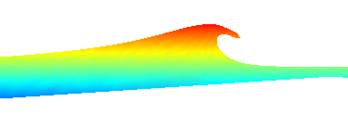
2D
Overturning waves (slope of bed: 1:15) (Please click here to download the
movie)
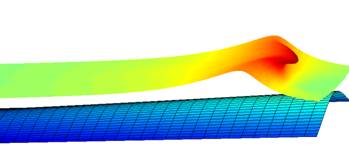
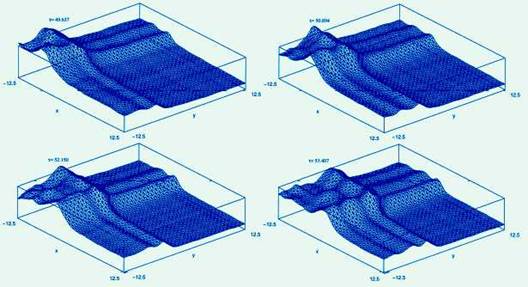
3D
Overturning waves on 3D bed
Tank length: 19d;
Width: 8d; Initial wave height: 0.6d; slope of bed 1:15; total CPU time: 54
minutes on a normal PC (Pentium ¢ô 2.53GHz processor, 1G RAM) for the computing period
from ![]() to
to ![]()
(Please click here to download the
movie)
SLOSHWav
This code was
developed when Dr Ma worked in University Colleague London (most relevant
publications: Wu, G.X., Ma, Q.W and
Eatock Taylor R. 1998, "Numerical simulation of sloshing waves based on
finite element method", Applied
Ocean Research, Vol. 20, pp. 337-355) and can be used to simulate
three dimensional sloshing waves in a fluid container subjected to any motion
and may be applied to solving a range of engineering problems, such as water
flow on deck of ships and offshore floating structures, sloshing motion of oil
in oil tanks and water waves in a lake caused by strong winds (if pressure
distribution is given) and earthquakes (if the motion caused by earthquake is
specified).
An example of sloshing wave
simulated using SLOSHWav is
shown in the following figure.Sloshing
waves in a square tanks
GENWav
This code was
developed when Dr Ma worked in University Colleague London (most relevant
publications: Ma, Q.W., Wu, G.X. &
Eatock Taylor, R., 2001, "Finite element simulation of fully non
STRUCWav
This code was developed when Dr Ma worked in
University Colleague London (most relevant publications: Ma, Q.W., Wu, G.X.
& Eatock Taylor, R., 2001, "Finite element simulation of fully non
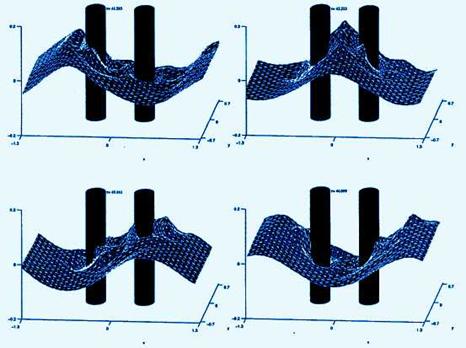
Interaction between steep
waves and two cylinders
FLOATMov
This code
was developed when Dr Ma worked in University Colleague London and
Surge motion of a SPAR
platform with open bottom tank
For
further details of these codes, please contact Dr. Qingwei Ma via q.ma@city.ac.uk