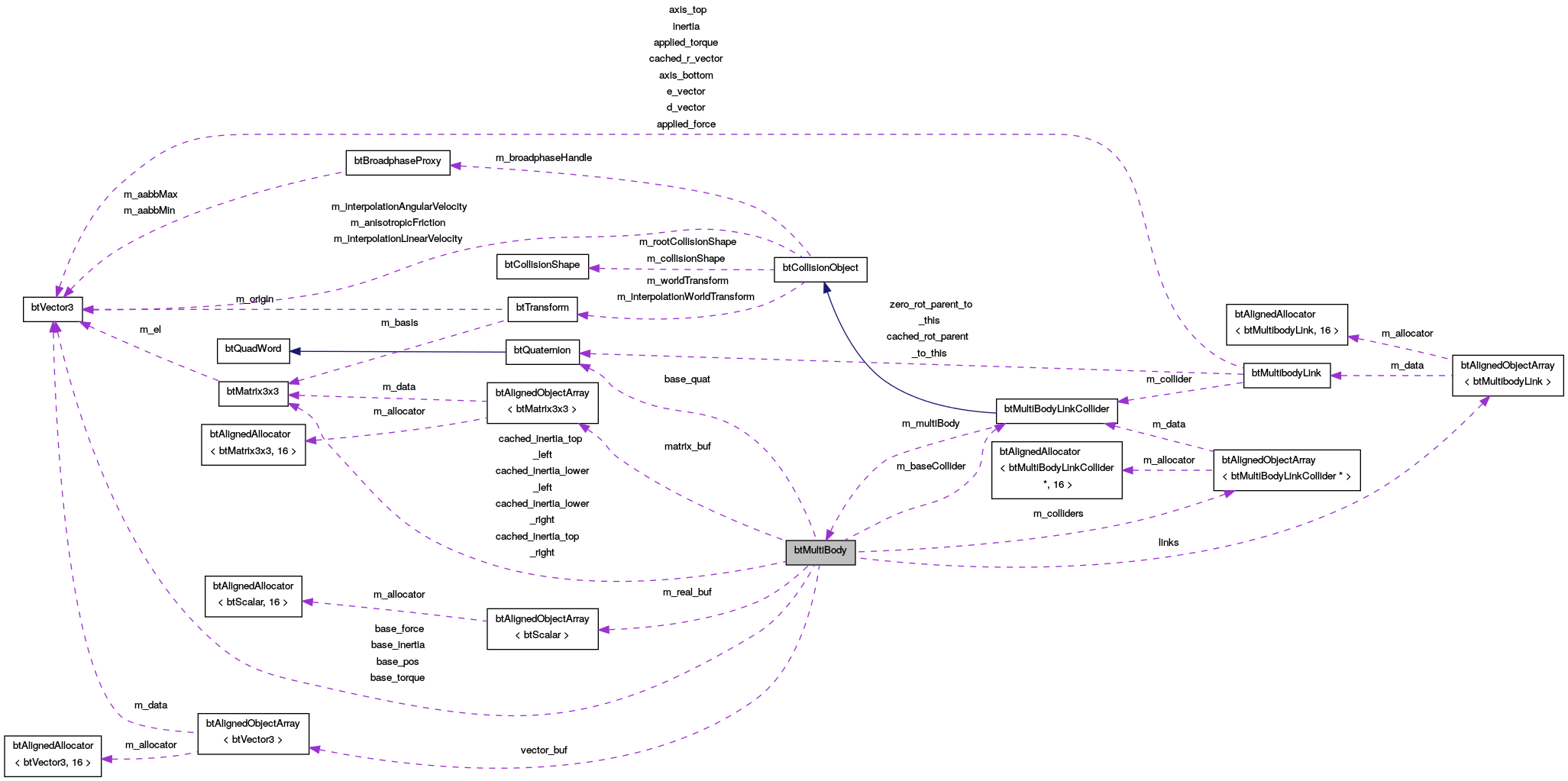
#include <btMultiBody.h>
Private Member Functions | |
| btMultiBody (const btMultiBody &) | |
| void | operator= (const btMultiBody &) |
| void | compTreeLinkVelocities (btVector3 *omega, btVector3 *vel) const |
| void | solveImatrix (const btVector3 &rhs_top, const btVector3 &rhs_bot, float result[6]) const |
Detailed Description
Definition at line 37 of file btMultiBody.h.
Constructor & Destructor Documentation
| btMultiBody::btMultiBody | ( | int | n_links, |
| btScalar | mass, | ||
| const btVector3 & | inertia, | ||
| bool | fixed_base_, | ||
| bool | can_sleep_ | ||
| ) |
Definition at line 79 of file btMultiBody.cpp.
| btMultiBody::~btMultiBody | ( | ) |
Definition at line 109 of file btMultiBody.cpp.
|
private |
Member Function Documentation
|
inline |
Definition at line 221 of file btMultiBody.h.
|
inline |
Definition at line 225 of file btMultiBody.h.
| void btMultiBody::addJointTorque | ( | int | i, |
| btScalar | Q | ||
| ) |
Definition at line 350 of file btMultiBody.cpp.
| void btMultiBody::addLinkForce | ( | int | i, |
| const btVector3 & | f | ||
| ) |
Definition at line 340 of file btMultiBody.cpp.
| void btMultiBody::addLinkTorque | ( | int | i, |
| const btVector3 & | t | ||
| ) |
Definition at line 345 of file btMultiBody.cpp.
|
inline |
Definition at line 269 of file btMultiBody.h.
Definition at line 278 of file btMultiBody.h.
| btMultiBody::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
| void btMultiBody::calcAccelerationDeltas | ( | const btScalar * | force, |
| btScalar * | output, | ||
| btAlignedObjectArray< btScalar > & | scratch_r, | ||
| btAlignedObjectArray< btVector3 > & | scratch_v | ||
| ) | const |
Definition at line 732 of file btMultiBody.cpp.
| void btMultiBody::checkMotionAndSleepIfRequired | ( | btScalar | timestep | ) |
Definition at line 982 of file btMultiBody.cpp.
| void btMultiBody::clearForcesAndTorques | ( | ) |
Definition at line 321 of file btMultiBody.cpp.
| void btMultiBody::clearVelocities | ( | ) |
Definition at line 333 of file btMultiBody.cpp.
Definition at line 259 of file btMultiBody.cpp.
| void btMultiBody::fillContactJacobian | ( | int | link, |
| const btVector3 & | contact_point, | ||
| const btVector3 & | normal, | ||
| btScalar * | jac, | ||
| btAlignedObjectArray< btScalar > & | scratch_r, | ||
| btAlignedObjectArray< btVector3 > & | scratch_v, | ||
| btAlignedObjectArray< btMatrix3x3 > & | scratch_m | ||
| ) | const |
Definition at line 892 of file btMultiBody.cpp.
|
inline |
Definition at line 368 of file btMultiBody.h.
| btVector3 btMultiBody::getAngularMomentum | ( | ) | const |
Definition at line 300 of file btMultiBody.cpp.
|
inline |
Definition at line 91 of file btMultiBody.h.
|
inline |
Definition at line 95 of file btMultiBody.h.
|
inline |
Definition at line 230 of file btMultiBody.h.
|
inline |
Definition at line 114 of file btMultiBody.h.
|
inline |
Definition at line 113 of file btMultiBody.h.
|
inline |
Definition at line 140 of file btMultiBody.h.
|
inline |
Definition at line 131 of file btMultiBody.h.
|
inline |
Definition at line 231 of file btMultiBody.h.
|
inline |
Definition at line 132 of file btMultiBody.h.
|
inline |
Definition at line 345 of file btMultiBody.h.
| btScalar btMultiBody::getJointPos | ( | int | i | ) | const |
Definition at line 180 of file btMultiBody.cpp.
| btScalar btMultiBody::getJointTorque | ( | int | i | ) | const |
Definition at line 365 of file btMultiBody.cpp.
| btScalar btMultiBody::getJointVel | ( | int | i | ) | const |
Definition at line 185 of file btMultiBody.cpp.
| btScalar btMultiBody::getKineticEnergy | ( | ) | const |
Definition at line 280 of file btMultiBody.cpp.
|
inline |
Definition at line 360 of file btMultiBody.h.
|
inline |
Definition at line 76 of file btMultiBody.h.
|
inline |
Definition at line 81 of file btMultiBody.h.
| const btVector3 & btMultiBody::getLinkForce | ( | int | i | ) | const |
Definition at line 355 of file btMultiBody.cpp.
| const btVector3 & btMultiBody::getLinkInertia | ( | int | i | ) | const |
Definition at line 175 of file btMultiBody.cpp.
| btScalar btMultiBody::getLinkMass | ( | int | i | ) | const |
Definition at line 170 of file btMultiBody.cpp.
| const btVector3 & btMultiBody::getLinkTorque | ( | int | i | ) | const |
Definition at line 360 of file btMultiBody.cpp.
|
inline |
Definition at line 381 of file btMultiBody.h.
|
inline |
Definition at line 112 of file btMultiBody.h.
| int btMultiBody::getParent | ( | int | link_num | ) | const |
Definition at line 165 of file btMultiBody.cpp.
| const btQuaternion & btMultiBody::getParentToLocalRot | ( | int | i | ) | const |
Definition at line 206 of file btMultiBody.cpp.
| const btVector3 & btMultiBody::getRVector | ( | int | i | ) | const |
Definition at line 201 of file btMultiBody.cpp.
|
inline |
Definition at line 373 of file btMultiBody.h.
|
inline |
Definition at line 177 of file btMultiBody.h.
|
inline |
Definition at line 136 of file btMultiBody.h.
| void btMultiBody::goToSleep | ( | ) |
Definition at line 977 of file btMultiBody.cpp.
|
inline |
Definition at line 340 of file btMultiBody.h.
|
inline |
Definition at line 394 of file btMultiBody.h.
|
inline |
Definition at line 335 of file btMultiBody.h.
Definition at line 239 of file btMultiBody.cpp.
Definition at line 211 of file btMultiBody.cpp.
|
private |
|
inline |
Definition at line 87 of file btMultiBody.h.
|
inline |
Definition at line 124 of file btMultiBody.h.
|
inline |
Definition at line 123 of file btMultiBody.h.
|
inline |
Definition at line 155 of file btMultiBody.h.
|
inline |
Definition at line 142 of file btMultiBody.h.
|
inline |
Definition at line 146 of file btMultiBody.h.
|
inline |
Definition at line 330 of file btMultiBody.h.
|
inline |
Definition at line 349 of file btMultiBody.h.
|
inline |
Definition at line 390 of file btMultiBody.h.
| void btMultiBody::setJointPos | ( | int | i, |
| btScalar | q | ||
| ) |
Definition at line 190 of file btMultiBody.cpp.
| void btMultiBody::setJointVel | ( | int | i, |
| btScalar | qdot | ||
| ) |
Definition at line 196 of file btMultiBody.cpp.
|
inline |
Definition at line 364 of file btMultiBody.h.
|
inline |
Definition at line 385 of file btMultiBody.h.
|
inline |
Definition at line 355 of file btMultiBody.h.
| void btMultiBody::setupPrismatic | ( | int | i, |
| btScalar | mass, | ||
| const btVector3 & | inertia, | ||
| int | parent, | ||
| const btQuaternion & | rot_parent_to_this, | ||
| const btVector3 & | joint_axis, | ||
| const btVector3 & | r_vector_when_q_zero, | ||
| bool | disableParentCollision = false |
||
| ) |
Definition at line 113 of file btMultiBody.cpp.
| void btMultiBody::setupRevolute | ( | int | i, |
| btScalar | mass, | ||
| const btVector3 & | inertia, | ||
| int | parent, | ||
| const btQuaternion & | zero_rot_parent_to_this, | ||
| const btVector3 & | joint_axis, | ||
| const btVector3 & | parent_axis_position, | ||
| const btVector3 & | my_axis_position, | ||
| bool | disableParentCollision = false |
||
| ) |
Definition at line 137 of file btMultiBody.cpp.
|
inline |
Definition at line 377 of file btMultiBody.h.
|
inline |
Definition at line 151 of file btMultiBody.h.
|
private |
solve I * x = rhs, so the result = invI * rhs
Special routine for calculating the inverse of a spatial inertia matrix the 6x6 matrix is stored as 4 blocks of 3x3 matrices
Definition at line 682 of file btMultiBody.cpp.
| void btMultiBody::stepPositions | ( | btScalar | dt | ) |
Definition at line 856 of file btMultiBody.cpp.
| void btMultiBody::stepVelocities | ( | btScalar | dt, |
| btAlignedObjectArray< btScalar > & | scratch_r, | ||
| btAlignedObjectArray< btVector3 > & | scratch_v, | ||
| btAlignedObjectArray< btMatrix3x3 > & | scratch_m | ||
| ) |
Definition at line 393 of file btMultiBody.cpp.
| void btMultiBody::wakeUp | ( | ) |
Definition at line 972 of file btMultiBody.cpp.
Definition at line 250 of file btMultiBody.cpp.
Definition at line 228 of file btMultiBody.cpp.
Member Data Documentation
|
private |
Definition at line 454 of file btMultiBody.h.
|
private |
Definition at line 418 of file btMultiBody.h.
|
private |
Definition at line 416 of file btMultiBody.h.
|
private |
Definition at line 415 of file btMultiBody.h.
|
private |
Definition at line 412 of file btMultiBody.h.
|
private |
Definition at line 413 of file btMultiBody.h.
|
private |
Definition at line 419 of file btMultiBody.h.
|
private |
Definition at line 448 of file btMultiBody.h.
|
private |
Definition at line 449 of file btMultiBody.h.
|
private |
Definition at line 446 of file btMultiBody.h.
|
private |
Definition at line 447 of file btMultiBody.h.
|
private |
Definition at line 455 of file btMultiBody.h.
|
private |
Definition at line 451 of file btMultiBody.h.
|
private |
Definition at line 421 of file btMultiBody.h.
|
private |
Definition at line 460 of file btMultiBody.h.
|
private |
Definition at line 410 of file btMultiBody.h.
|
private |
Definition at line 422 of file btMultiBody.h.
|
private |
Definition at line 458 of file btMultiBody.h.
|
private |
Definition at line 463 of file btMultiBody.h.
|
private |
Definition at line 459 of file btMultiBody.h.
|
private |
Definition at line 462 of file btMultiBody.h.
|
private |
Definition at line 440 of file btMultiBody.h.
|
private |
Definition at line 461 of file btMultiBody.h.
|
private |
Definition at line 442 of file btMultiBody.h.
|
private |
Definition at line 456 of file btMultiBody.h.
|
private |
Definition at line 441 of file btMultiBody.h.
The documentation for this class was generated from the following files:
