|
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| void | setWorldTransform (const btTransform &worldTransform) |
| |
| const btTransform & | getWorldTransform () const |
| |
| void | getVelocityInLocalPointNoDelta (const btVector3 &rel_pos, btVector3 &velocity) const |
| |
| void | getVelocityInLocalPointObsolete (const btVector3 &rel_pos, btVector3 &velocity) const |
| |
| void | getAngularVelocity (btVector3 &angVel) const |
| |
| void | applyImpulse (const btVector3 &linearComponent, const btVector3 &angularComponent, const btScalar impulseMagnitude) |
| |
| void | internalApplyPushImpulse (const btVector3 &linearComponent, const btVector3 &angularComponent, btScalar impulseMagnitude) |
| |
| const btVector3 & | getDeltaLinearVelocity () const |
| |
| const btVector3 & | getDeltaAngularVelocity () const |
| |
| const btVector3 & | getPushVelocity () const |
| |
| const btVector3 & | getTurnVelocity () const |
| |
| btVector3 & | internalGetDeltaLinearVelocity () |
| | some internal methods, don't use them More...
|
| |
| btVector3 & | internalGetDeltaAngularVelocity () |
| |
| const btVector3 & | internalGetAngularFactor () const |
| |
| const btVector3 & | internalGetInvMass () const |
| |
| void | internalSetInvMass (const btVector3 &invMass) |
| |
| btVector3 & | internalGetPushVelocity () |
| |
| btVector3 & | internalGetTurnVelocity () |
| |
| void | internalGetVelocityInLocalPointObsolete (const btVector3 &rel_pos, btVector3 &velocity) const |
| |
| void | internalGetAngularVelocity (btVector3 &angVel) const |
| |
| void | internalApplyImpulse (const btVector3 &linearComponent, const btVector3 &angularComponent, const btScalar impulseMagnitude) |
| |
| void | writebackVelocity () |
| |
| void | writebackVelocityAndTransform (btScalar timeStep, btScalar splitImpulseTurnErp) |
| |
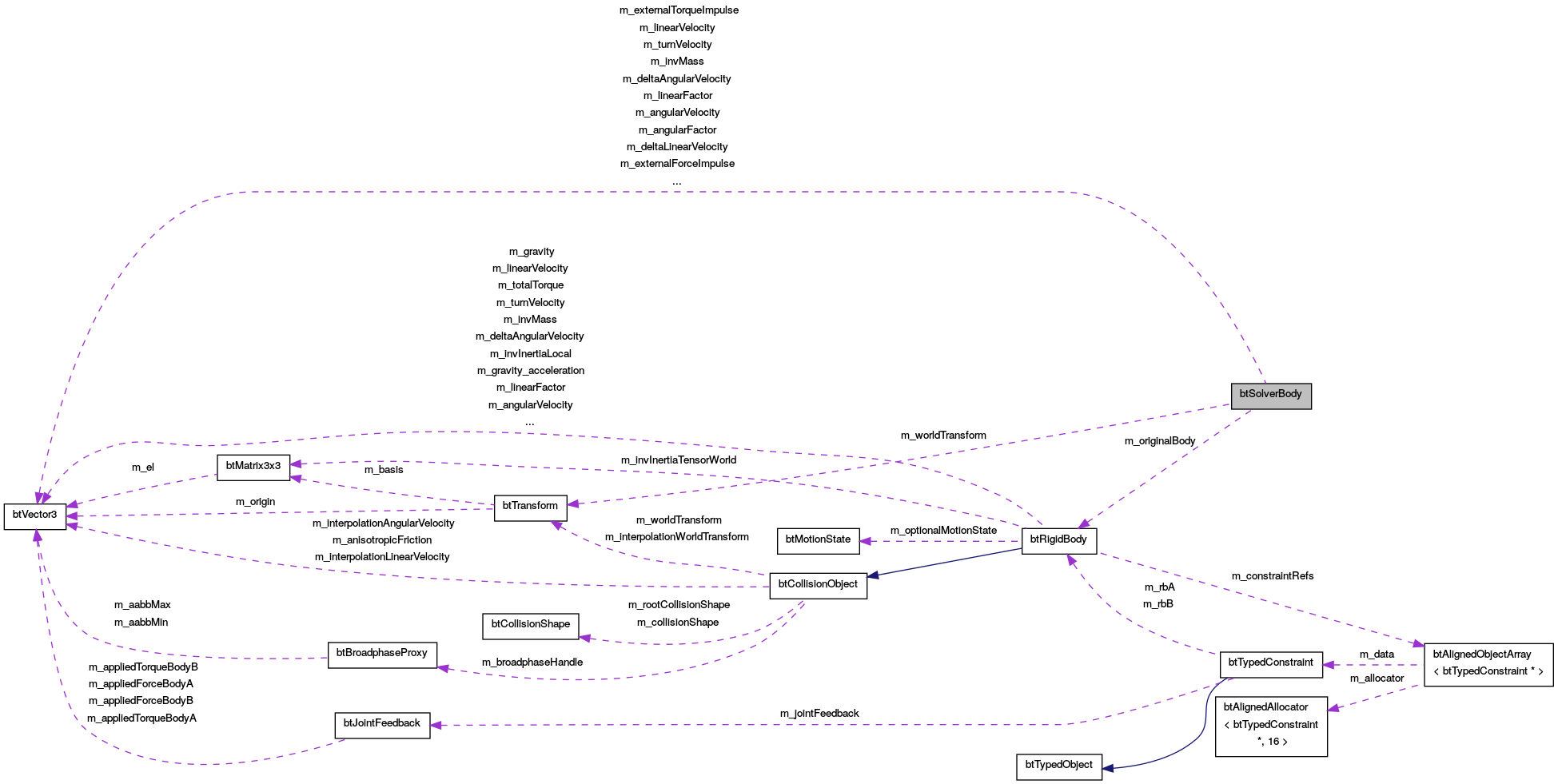
The btSolverBody is an internal datastructure for the constraint solver. Only necessary data is packed to increase cache coherence/performance.
Definition at line 108 of file btSolverBody.h.