#include <btSoftBodySolver_OpenCLSIMDAware.h>
Public Member Functions | |
| btOpenCLSoftBodySolverSIMDAware (cl_command_queue queue, cl_context ctx, bool bUpdateAchchoredNodePos=false) | |
| virtual | ~btOpenCLSoftBodySolverSIMDAware () |
| virtual SolverTypes | getSolverType () const |
| Return the type of the solver. More... | |
| virtual btSoftBodyLinkData & | getLinkData () |
| virtual void | optimize (btAlignedObjectArray< btSoftBody * > &softBodies, bool forceUpdate=false) |
| Optimize soft bodies in this solver. More... | |
| virtual void | solveConstraints (float solverdt) |
| Solve constraints for a set of soft bodies. More... | |
 Public Member Functions inherited from btOpenCLSoftBodySolver Public Member Functions inherited from btOpenCLSoftBodySolver | |
| btOpenCLSoftBodySolver (cl_command_queue queue, cl_context ctx, bool bUpdateAchchoredNodePos=false) | |
| virtual | ~btOpenCLSoftBodySolver () |
| btOpenCLAcceleratedSoftBodyInterface * | findSoftBodyInterface (const btSoftBody *const softBody) |
| virtual btSoftBodyVertexData & | getVertexData () |
| virtual btSoftBodyTriangleData & | getTriangleData () |
| virtual bool | checkInitialized () |
| Ensure that this solver is initialized. More... | |
| virtual void | updateSoftBodies () |
| Perform necessary per-step updates of soft bodies such as recomputing normals and bounding boxes. More... | |
| virtual void | copyBackToSoftBodies (bool bMove=true) |
| Copy necessary data back to the original soft body source objects. More... | |
| virtual void | predictMotion (float solverdt) |
| Predict motion of soft bodies into next timestep. More... | |
| virtual void | processCollision (btSoftBody *, const btCollisionObjectWrapper *) |
| virtual void | processCollision (btSoftBody *, btSoftBody *) |
| Process a collision between two soft bodies. More... | |
| virtual void | setDefaultWorkgroupSize (size_t workGroupSize) |
| virtual size_t | getDefaultWorkGroupSize () const |
| void | setCLFunctions (CLFunctions *funcs) |
| Public Member Functions inherited from btSoftBodySolver | |
| btSoftBodySolver () | |
| virtual | ~btSoftBodySolver () |
| virtual void | processCollision (btSoftBody *, const struct btCollisionObjectWrapper *)=0 |
| Process a collision between one of the world's soft bodies and another collision object. More... | |
| virtual void | setNumberOfPositionIterations (int iterations) |
| Set the number of velocity constraint solver iterations this solver uses. More... | |
| virtual int | getNumberOfPositionIterations () |
| Get the number of velocity constraint solver iterations this solver uses. More... | |
| virtual void | setNumberOfVelocityIterations (int iterations) |
| Set the number of velocity constraint solver iterations this solver uses. More... | |
| virtual int | getNumberOfVelocityIterations () |
| Get the number of velocity constraint solver iterations this solver uses. More... | |
| float | getTimeScale () |
| Return the timescale that the simulation is using. More... | |
Protected Member Functions | |
| virtual bool | buildShaders () |
| void | updateConstants (float timeStep) |
| float | computeTriangleArea (const Vectormath::Aos::Point3 &vertex0, const Vectormath::Aos::Point3 &vertex1, const Vectormath::Aos::Point3 &vertex2) |
| void | solveLinksForPosition (int startLink, int numLinks, float kst, float ti) |
| void | solveCollisionsAndUpdateVelocities (float isolverdt) |
| Protected Member Functions inherited from btOpenCLSoftBodySolver | |
| void | resetNormalsAndAreas (int numVertices) |
| void | normalizeNormalsAndAreas (int numVertices) |
| void | executeUpdateSoftBodies (int firstTriangle, int numTriangles) |
| void | prepareCollisionConstraints () |
| Sort the collision object details array and generate indexing into it for the per-cloth collision object array. More... | |
| Vectormath::Aos::Vector3 | ProjectOnAxis (const Vectormath::Aos::Vector3 &v, const Vectormath::Aos::Vector3 &a) |
| void | ApplyClampedForce (float solverdt, const Vectormath::Aos::Vector3 &force, const Vectormath::Aos::Vector3 &vertexVelocity, float inverseMass, Vectormath::Aos::Vector3 &vertexForce) |
| int | findSoftBodyIndex (const btSoftBody *const softBody) |
| virtual void | applyForces (float solverdt) |
| void | updateFixedVertexPositions () |
| virtual void | integrate (float solverdt) |
| Integrate motion on the solver. More... | |
| float | computeTriangleArea (const Vectormath::Aos::Point3 &vertex0, const Vectormath::Aos::Point3 &vertex1, const Vectormath::Aos::Point3 &vertex2) |
| void | prepareLinks () |
| void | solveLinksForVelocity (int startLink, int numLinks, float kst) |
| void | updatePositionsFromVelocities (float solverdt) |
| void | updateVelocitiesFromPositionsWithVelocities (float isolverdt) |
| void | updateVelocitiesFromPositionsWithoutVelocities (float isolverdt) |
| void | updateBounds () |
| void | releaseKernels () |
Additional Inherited Members | |
| Public Types inherited from btSoftBodySolver | |
| enum | SolverTypes { DEFAULT_SOLVER, CPU_SOLVER, CL_SOLVER, CL_SIMD_SOLVER, DX_SOLVER, DX_SIMD_SOLVER } |
| Public Attributes inherited from btOpenCLSoftBodySolver | |
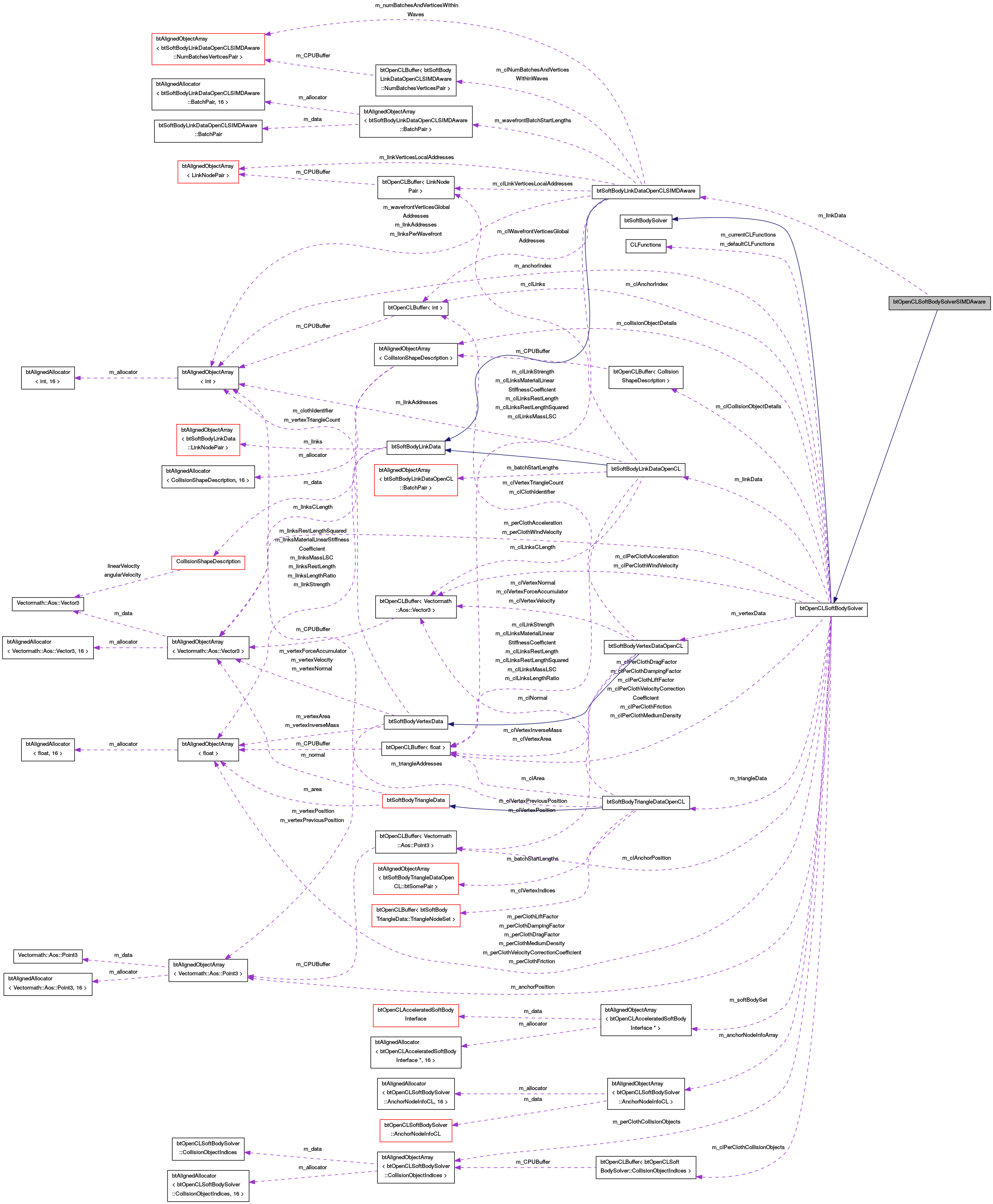
| btSoftBodyLinkDataOpenCL | m_linkData |
| btSoftBodyVertexDataOpenCL | m_vertexData |
| btSoftBodyTriangleDataOpenCL | m_triangleData |
Detailed Description
Definition at line 32 of file btSoftBodySolver_OpenCLSIMDAware.h.
Constructor & Destructor Documentation
| btOpenCLSoftBodySolverSIMDAware::btOpenCLSoftBodySolverSIMDAware | ( | cl_command_queue | queue, |
| cl_context | ctx, | ||
| bool | bUpdateAchchoredNodePos = false |
||
| ) |
Definition at line 172 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
virtual |
Definition at line 184 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
Member Function Documentation
|
protectedvirtual |
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 551 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
protected |
|
virtual |
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 383 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
inlinevirtual |
Return the type of the solver.
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 66 of file btSoftBodySolver_OpenCLSIMDAware.h.
|
virtual |
Optimize soft bodies in this solver.
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 189 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
protectedvirtual |
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 508 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
virtual |
Solve constraints for a set of soft bodies.
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 424 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
protectedvirtual |
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 475 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
|
protectedvirtual |
Reimplemented from btOpenCLSoftBodySolver.
Definition at line 392 of file btSoftBodySolver_OpenCLSIMDAware.cpp.
Member Data Documentation
|
protected |
Definition at line 37 of file btSoftBodySolver_OpenCLSIMDAware.h.
The documentation for this class was generated from the following files:
