|
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| virtual btScalar | solveGroup (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifold, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &info, btIDebugDraw *debugDrawer, btDispatcher *dispatcher) |
| | this method should not be called, it was just used during porting/integration of Featherstone btMultiBody, providing backwards compatibility but no support for btMultiBodyConstraint (only contact constraints) More...
|
| |
| virtual void | solveMultiBodyGroup (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifold, int numManifolds, btTypedConstraint **constraints, int numConstraints, btMultiBodyConstraint **multiBodyConstraints, int numMultiBodyConstraints, const btContactSolverInfo &info, btIDebugDraw *debugDrawer, btDispatcher *dispatcher) |
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btSequentialImpulseConstraintSolver () |
| |
| virtual | ~btSequentialImpulseConstraintSolver () |
| |
| virtual void | reset () |
| | clear internal cached data and reset random seed More...
|
| |
| unsigned long | btRand2 () |
| |
| int | btRandInt2 (int n) |
| |
| void | setRandSeed (unsigned long seed) |
| |
| unsigned long | getRandSeed () const |
| |
| virtual btConstraintSolverType | getSolverType () const |
| |
| virtual | ~btConstraintSolver () |
| |
| virtual void | prepareSolve (int, int) |
| |
| virtual void | allSolved (const btContactSolverInfo &, class btIDebugDraw *) |
| |
|
| void | resolveSingleConstraintRowGeneric (const btMultiBodySolverConstraint &c) |
| |
| void | resolveSingleConstraintRowGenericMultiBody (const btMultiBodySolverConstraint &c) |
| |
| void | convertContacts (btPersistentManifold **manifoldPtr, int numManifolds, const btContactSolverInfo &infoGlobal) |
| |
| btMultiBodySolverConstraint & | addMultiBodyFrictionConstraint (const btVector3 &normalAxis, btPersistentManifold *manifold, int frictionIndex, btManifoldPoint &cp, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, const btContactSolverInfo &infoGlobal, btScalar desiredVelocity=0, btScalar cfmSlip=0) |
| |
| void | setupMultiBodyJointLimitConstraint (btMultiBodySolverConstraint &constraintRow, btScalar *jacA, btScalar *jacB, btScalar penetration, btScalar combinedFrictionCoeff, btScalar combinedRestitutionCoeff, const btContactSolverInfo &infoGlobal) |
| |
| void | setupMultiBodyContactConstraint (btMultiBodySolverConstraint &solverConstraint, const btVector3 &contactNormal, btManifoldPoint &cp, const btContactSolverInfo &infoGlobal, btScalar &relaxation, bool isFriction, btScalar desiredVelocity=0, btScalar cfmSlip=0) |
| |
| void | convertMultiBodyContact (btPersistentManifold *manifold, const btContactSolverInfo &infoGlobal) |
| |
| virtual btScalar | solveGroupCacheFriendlySetup (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| |
| virtual btScalar | solveSingleIteration (int iteration, btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| |
| void | applyDeltaVee (btScalar *deltaV, btScalar impulse, int velocityIndex, int ndof) |
| |
| void | setupFrictionConstraint (btSolverConstraint &solverConstraint, const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| |
| void | setupRollingFrictionConstraint (btSolverConstraint &solverConstraint, const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| |
| btSolverConstraint & | addFrictionConstraint (const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, int frictionIndex, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0., btScalar cfmSlip=0.) |
| |
| btSolverConstraint & | addRollingFrictionConstraint (const btVector3 &normalAxis, int solverBodyIdA, int solverBodyIdB, int frictionIndex, btManifoldPoint &cp, const btVector3 &rel_pos1, const btVector3 &rel_pos2, btCollisionObject *colObj0, btCollisionObject *colObj1, btScalar relaxation, btScalar desiredVelocity=0, btScalar cfmSlip=0.f) |
| |
| void | setupContactConstraint (btSolverConstraint &solverConstraint, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btContactSolverInfo &infoGlobal, btScalar &relaxation, const btVector3 &rel_pos1, const btVector3 &rel_pos2) |
| |
| void | setFrictionConstraintImpulse (btSolverConstraint &solverConstraint, int solverBodyIdA, int solverBodyIdB, btManifoldPoint &cp, const btContactSolverInfo &infoGlobal) |
| |
| btScalar | restitutionCurve (btScalar rel_vel, btScalar restitution) |
| |
| void | convertContact (btPersistentManifold *manifold, const btContactSolverInfo &infoGlobal) |
| |
| void | resolveSplitPenetrationSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| void | resolveSplitPenetrationImpulseCacheFriendly (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| int | getOrInitSolverBody (btCollisionObject &body, btScalar timeStep) |
| |
| void | initSolverBody (btSolverBody *solverBody, btCollisionObject *collisionObject, btScalar timeStep) |
| |
| void | resolveSingleConstraintRowGeneric (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| void | resolveSingleConstraintRowGenericSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| void | resolveSingleConstraintRowLowerLimit (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| void | resolveSingleConstraintRowLowerLimitSIMD (btSolverBody &bodyA, btSolverBody &bodyB, const btSolverConstraint &contactConstraint) |
| |
| virtual void | solveGroupCacheFriendlySplitImpulseIterations (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| |
| virtual btScalar | solveGroupCacheFriendlyFinish (btCollisionObject **bodies, int numBodies, const btContactSolverInfo &infoGlobal) |
| |
| virtual btScalar | solveGroupCacheFriendlyIterations (btCollisionObject **bodies, int numBodies, btPersistentManifold **manifoldPtr, int numManifolds, btTypedConstraint **constraints, int numConstraints, const btContactSolverInfo &infoGlobal, btIDebugDraw *debugDrawer) |
| |
avoid collision response between two static objects
Bullet has several options to set the friction directions By default, each contact has only a single friction direction that is recomputed automatically very frame based on the relative linear velocity. If the relative velocity it zero, it will automatically compute a friction direction.
You can also enable two friction directions, using the SOLVER_USE_2_FRICTION_DIRECTIONS. In that case, the second friction direction will be orthogonal to both contact normal and first friction direction.
If you choose SOLVER_DISABLE_VELOCITY_DEPENDENT_FRICTION_DIRECTION, then the friction will be independent from the relative projected velocity.
The user can manually override the friction directions for certain contacts using a contact callback, and set the cp.m_lateralFrictionInitialized to true In that case, you can set the target relative motion in each friction direction (cp.m_contactMotion1 and cp.m_contactMotion2) this will give a conveyor belt effect
Definition at line 562 of file btMultiBodyConstraintSolver.cpp.
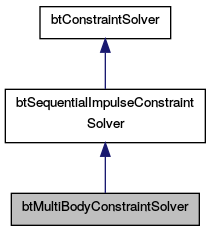
 Public Member Functions inherited from btSequentialImpulseConstraintSolver
Public Member Functions inherited from btSequentialImpulseConstraintSolver