|
| | btMultiBodyDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *pairCache, btMultiBodyConstraintSolver *constraintSolver, btCollisionConfiguration *collisionConfiguration) |
| |
| virtual | ~btMultiBodyDynamicsWorld () |
| |
| virtual void | addMultiBody (btMultiBody *body, short group=btBroadphaseProxy::DefaultFilter, short mask=btBroadphaseProxy::AllFilter) |
| |
| virtual void | removeMultiBody (btMultiBody *body) |
| |
| virtual void | addMultiBodyConstraint (btMultiBodyConstraint *constraint) |
| |
| virtual void | removeMultiBodyConstraint (btMultiBodyConstraint *constraint) |
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btDiscreteDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *pairCache, btConstraintSolver *constraintSolver, btCollisionConfiguration *collisionConfiguration) |
| | this btDiscreteDynamicsWorld constructor gets created objects from the user, and will not delete those More...
|
| |
| virtual | ~btDiscreteDynamicsWorld () |
| |
| virtual int | stepSimulation (btScalar timeStep, int maxSubSteps=1, btScalar fixedTimeStep=btScalar(1.)/btScalar(60.)) |
| | if maxSubSteps > 0, it will interpolate motion between fixedTimeStep's More...
|
| |
| virtual void | synchronizeMotionStates () |
| |
| void | synchronizeSingleMotionState (btRigidBody *body) |
| | this can be useful to synchronize a single rigid body -> graphics object More...
|
| |
| virtual void | addConstraint (btTypedConstraint *constraint, bool disableCollisionsBetweenLinkedBodies=false) |
| |
| virtual void | removeConstraint (btTypedConstraint *constraint) |
| |
| virtual void | addAction (btActionInterface *) |
| |
| virtual void | removeAction (btActionInterface *) |
| |
| btSimulationIslandManager * | getSimulationIslandManager () |
| |
| const btSimulationIslandManager * | getSimulationIslandManager () const |
| |
| btCollisionWorld * | getCollisionWorld () |
| |
| virtual void | setGravity (const btVector3 &gravity) |
| |
| virtual btVector3 | getGravity () const |
| |
| virtual void | addCollisionObject (btCollisionObject *collisionObject, short int collisionFilterGroup=btBroadphaseProxy::StaticFilter, short int collisionFilterMask=btBroadphaseProxy::AllFilter^btBroadphaseProxy::StaticFilter) |
| |
| virtual void | addRigidBody (btRigidBody *body) |
| |
| virtual void | addRigidBody (btRigidBody *body, short group, short mask) |
| |
| virtual void | removeRigidBody (btRigidBody *body) |
| |
| virtual void | removeCollisionObject (btCollisionObject *collisionObject) |
| | removeCollisionObject will first check if it is a rigid body, if so call removeRigidBody otherwise call btCollisionWorld::removeCollisionObject More...
|
| |
| void | debugDrawConstraint (btTypedConstraint *constraint) |
| |
| virtual void | debugDrawWorld () |
| |
| virtual void | setConstraintSolver (btConstraintSolver *solver) |
| |
| virtual btConstraintSolver * | getConstraintSolver () |
| |
| virtual int | getNumConstraints () const |
| |
| virtual btTypedConstraint * | getConstraint (int index) |
| |
| virtual const btTypedConstraint * | getConstraint (int index) const |
| |
| virtual btDynamicsWorldType | getWorldType () const |
| |
| virtual void | clearForces () |
| | the forces on each rigidbody is accumulating together with gravity. clear this after each timestep. More...
|
| |
| virtual void | applyGravity () |
| | apply gravity, call this once per timestep More...
|
| |
| virtual void | setNumTasks (int numTasks) |
| |
| virtual void | updateVehicles (btScalar timeStep) |
| | obsolete, use updateActions instead More...
|
| |
| virtual void | addVehicle (btActionInterface *vehicle) |
| | obsolete, use addAction instead More...
|
| |
| virtual void | removeVehicle (btActionInterface *vehicle) |
| | obsolete, use removeAction instead More...
|
| |
| virtual void | addCharacter (btActionInterface *character) |
| | obsolete, use addAction instead More...
|
| |
| virtual void | removeCharacter (btActionInterface *character) |
| | obsolete, use removeAction instead More...
|
| |
| void | setSynchronizeAllMotionStates (bool synchronizeAll) |
| |
| bool | getSynchronizeAllMotionStates () const |
| |
| void | setApplySpeculativeContactRestitution (bool enable) |
| |
| bool | getApplySpeculativeContactRestitution () const |
| |
| virtual void | serialize (btSerializer *serializer) |
| | Preliminary serialization test for Bullet 2.76. Loading those files requires a separate parser (see Bullet/Demos/SerializeDemo) More...
|
| |
| void | setLatencyMotionStateInterpolation (bool latencyInterpolation) |
| | Interpolate motion state between previous and current transform, instead of current and next transform. More...
|
| |
| bool | getLatencyMotionStateInterpolation () const |
| |
| | btDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *broadphase, btCollisionConfiguration *collisionConfiguration) |
| |
| virtual | ~btDynamicsWorld () |
| |
| void | setInternalTickCallback (btInternalTickCallback cb, void *worldUserInfo=0, bool isPreTick=false) |
| | Set the callback for when an internal tick (simulation substep) happens, optional user info. More...
|
| |
| void | setWorldUserInfo (void *worldUserInfo) |
| |
| void * | getWorldUserInfo () const |
| |
| btContactSolverInfo & | getSolverInfo () |
| |
| | btCollisionWorld (btDispatcher *dispatcher, btBroadphaseInterface *broadphasePairCache, btCollisionConfiguration *collisionConfiguration) |
| | for debug drawing More...
|
| |
| virtual | ~btCollisionWorld () |
| |
| void | setBroadphase (btBroadphaseInterface *pairCache) |
| |
| const btBroadphaseInterface * | getBroadphase () const |
| |
| btBroadphaseInterface * | getBroadphase () |
| |
| btOverlappingPairCache * | getPairCache () |
| |
| btDispatcher * | getDispatcher () |
| |
| const btDispatcher * | getDispatcher () const |
| |
| void | updateSingleAabb (btCollisionObject *colObj) |
| |
| virtual void | updateAabbs () |
| |
| virtual void | computeOverlappingPairs () |
| | the computeOverlappingPairs is usually already called by performDiscreteCollisionDetection (or stepSimulation) it can be useful to use if you perform ray tests without collision detection/simulation More...
|
| |
| virtual void | setDebugDrawer (btIDebugDraw *debugDrawer) |
| |
| virtual btIDebugDraw * | getDebugDrawer () |
| |
| virtual void | debugDrawObject (const btTransform &worldTransform, const btCollisionShape *shape, const btVector3 &color) |
| |
| int | getNumCollisionObjects () const |
| |
| virtual void | rayTest (const btVector3 &rayFromWorld, const btVector3 &rayToWorld, RayResultCallback &resultCallback) const |
| | rayTest performs a raycast on all objects in the btCollisionWorld, and calls the resultCallback This allows for several queries: first hit, all hits, any hit, dependent on the value returned by the callback. More...
|
| |
| void | convexSweepTest (const btConvexShape *castShape, const btTransform &from, const btTransform &to, ConvexResultCallback &resultCallback, btScalar allowedCcdPenetration=btScalar(0.)) const |
| | convexTest performs a swept convex cast on all objects in the btCollisionWorld, and calls the resultCallback This allows for several queries: first hit, all hits, any hit, dependent on the value return by the callback. More...
|
| |
| void | contactTest (btCollisionObject *colObj, ContactResultCallback &resultCallback) |
| | contactTest performs a discrete collision test between colObj against all objects in the btCollisionWorld, and calls the resultCallback. More...
|
| |
| void | contactPairTest (btCollisionObject *colObjA, btCollisionObject *colObjB, ContactResultCallback &resultCallback) |
| | contactTest performs a discrete collision test between two collision objects and calls the resultCallback if overlap if detected. More...
|
| |
| btCollisionObjectArray & | getCollisionObjectArray () |
| |
| const btCollisionObjectArray & | getCollisionObjectArray () const |
| |
| virtual void | performDiscreteCollisionDetection () |
| |
| btDispatcherInfo & | getDispatchInfo () |
| |
| const btDispatcherInfo & | getDispatchInfo () const |
| |
| bool | getForceUpdateAllAabbs () const |
| |
| void | setForceUpdateAllAabbs (bool forceUpdateAllAabbs) |
| |
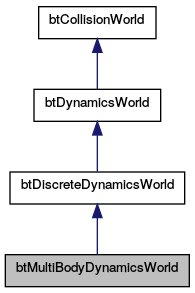
The btMultiBodyDynamicsWorld adds Featherstone multi body dynamics to Bullet This implementation is still preliminary/experimental.
Definition at line 29 of file btMultiBodyDynamicsWorld.h.
 Public Member Functions inherited from btDiscreteDynamicsWorld
Public Member Functions inherited from btDiscreteDynamicsWorld